Symet

Symetrical robot that scoots towards the light
Overview
Symet is the first BEAM robot I ever completed, becoming active on April 3, 2004. The idea and plans come from the book Junkbots, Bugbots, & Bots on Wheels, by Dave Hrynkiw and Mark W. Tilden.
It is a solar powered robot that scoots along on the tip of a single motor, using an FLED solarengine to store and dump energy. When it hits an obstacle, it topples to the side and, because of the orientation of the motor shaft, it changes direction. No smarts, but lots of fun. I especially enjoyed this guy because he was easy to get working, unlike the other robot I tried to build first, but proved to be too complicated for my first shot.
Definitely visit the web site for Junkbots, Bugbots, & Bots on Wheels, they’ve got a much better page about a Symet (well, actually their page is about THE Symet, this page is just about a Symet), including a sample chapter from the book. This page only covers the basics and some pics.
FLED Solarengine
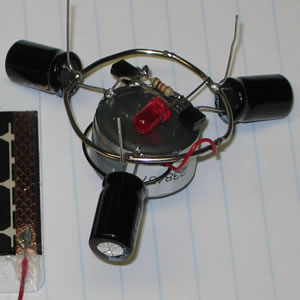
My Symet uses an FLED solarengine as described in the book. The trigger has only a few parts: a resistor, two transistors, and a flashing LED (FLED). Plus the three 1000 uF capacitors, a solar cell, and a motor. The FLED solarengine was simple to assemble, and seems to work well. In the future I may build another Symet using one of the more efficient solarengines they describe in the book.
PowerFilm Solar Cell
What’s this? A robot that can magically open any hotel room? But I thought you said a Symet doesn’t have any smarts? What gives?


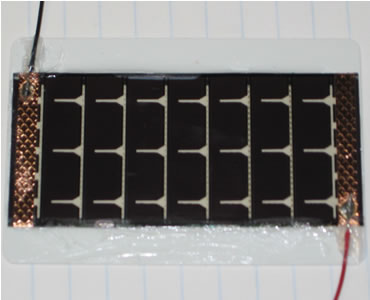
Actually, I used a PowerFilm solar cell which is so light and flexible that I had to reinforce it with something. And since I always do my cleaning, paperwork, and other work on the house before playing with robots (well, maybe not always :-) but this time I did), I had a hotel room key from a recent business trip that was ready to be thrown away. Since the solar cell fit perfectly on the credit card sized key, I glued it on with some silicone adhesive.
The PowerFilm is 3.3”L x 1.5”W in size, and is rated to output 22mA at 4.2 V. In my basement it looks more like 3 or so volts. I was planning on testing it outside today, but magically I woke up this morning and we had a snow storm overnight in April, so the only thing I’ll be going outside for is to clear the driveway.
Tires
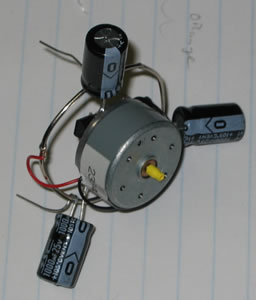 A Symet is built with a single motor, mounted with the drive shaft vertically. Then the robot sits balanced on the drive shaft and two of the capacitors. Because the Symet is off-center and at any given time is “toppled” to one side, only one edge of the driveshaft will be touching the ground. This is what makes the robot steer away from obstacles. To increase friction with the ground, I added a small piece of heat shrink tubing to the motor output shaft. I glued it on with silicone adhesive, which seems to only be sticky in one direction. It has good friction in the direction of motor rotation.
A Symet is built with a single motor, mounted with the drive shaft vertically. Then the robot sits balanced on the drive shaft and two of the capacitors. Because the Symet is off-center and at any given time is “toppled” to one side, only one edge of the driveshaft will be touching the ground. This is what makes the robot steer away from obstacles. To increase friction with the ground, I added a small piece of heat shrink tubing to the motor output shaft. I glued it on with silicone adhesive, which seems to only be sticky in one direction. It has good friction in the direction of motor rotation.
However, it does not have good friction along the motor shaft. Meaning that the “tire” works well for improving movement of the robot, but I can just pull it off the motorshaft with little force. So I’m assuming I’ll lose it at some point soon, but for now it works.
In Conclusion
In conclusion, my Symet was a great first robot. I was able to assemble the solderless prototype in under a half an hour. The most time consuming part was to solder leads onto the PowerFilm solar cell, because it ships with a protective plastic insulator over the + and - leads, so you have to melt through that coating to make an electrical connection.
Once the prototype was working I spent a couple more hours building the real thing. The hardest part was the positioning of the capacitors which I think I made a big mess out of, but it works pretty well anyway. So after a few weeks of reading the book and then ordering and waiting for the parts, then an afternoon of work, I’ve got my first operational “autonomous” robot.